火星车的被动悬架与主动悬架

在星球车中,悬架是星球探测车移动系统的重要组成部分,其主要作用是将车身与车轮(或车轴)连接起来,传递作用在车轮和车身间的力和力矩,缓和星球表面传给车身的冲击载荷,衰减由此引起的系统振动,保证探测车的行驶平顺性,保证车轮在路面凸凹不平时有理想的运动特性,保证探测车的稳定性。可以说悬架结构形式和性能在一定程度上决定了星球探测车的运动能力,而且关乎系统性能。
按控制方式,悬架可分为主动悬架、被动悬架两大类,被动悬架又分为弹性悬架、摇臂式悬架等多种形式。
1)弹性悬架
20世纪60年代到80年代,是星球探测车的早期发展阶段,这一阶段开发的星球探测车对设计寿命和设计行程要求不高,直接来源于地面车辆的弹性悬架得到了广泛的应用。
典型的基于弹性悬架的无人月球车是前苏联开发的Lunokhod 1&2月球车。这两辆月球车分别于1970年和1973年登陆月球,其车轮模块安装在仪器舱上,用一套由扭杆弹簧组成的弹性悬架完成对月面形貌的适应,如图1所示。
典型的基于弹性悬架的载人月球车是美国在APOLLO 15、16和17任务中使用的LRV月球车。LRV的悬架由扭杆弹簧和阻尼器等组成,如图2所示。
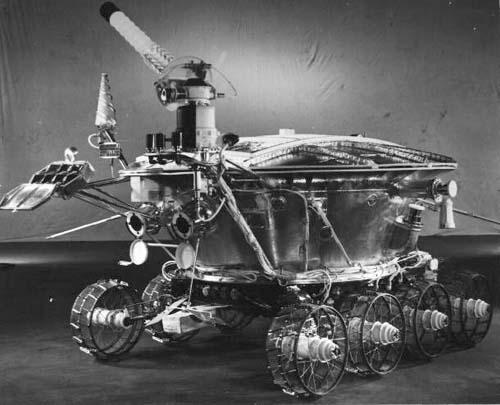
图1 前苏联的Lunokhod月球车
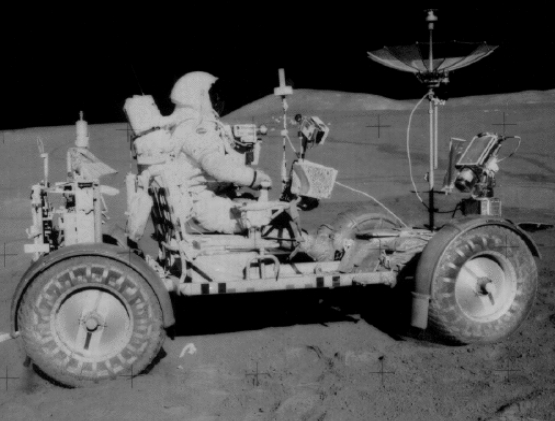
图2 美国Apoloo月球车
2)摇臂式悬架
1990年美国JPL(喷气推进实验室)的Bickler提出了著名的Rocker-bogie悬架结构,此后众多的研究人员对此进行了研究,并取得了大量的研究成果。美国已经发射的4辆火星车,即“索杰纳号”、“勇气号”、“机遇号”、“好奇号”,均采用摇臂式悬架而且实际工作表现大大超过预期,如图3所示。我国“玉兔”号月球车也采用的是这种摇臂式悬架,如图4所示。
摇臂式悬架极大地提高了星球探测车的探测能力,并已经成为目前主流悬架结构形式。摇臂式悬架不包含弹性元件,仅仅通过杆系和铰将车轮和车身连接起来。这种结构形式不但能承载车身,固定车轮,而且还可以通过摇臂的调整作用,使移动系统能被动地适应复杂地形,从而提高星球探测车的运动灵活性、地形的顺应性和越障能力。

图3 Rocker-bogie悬架
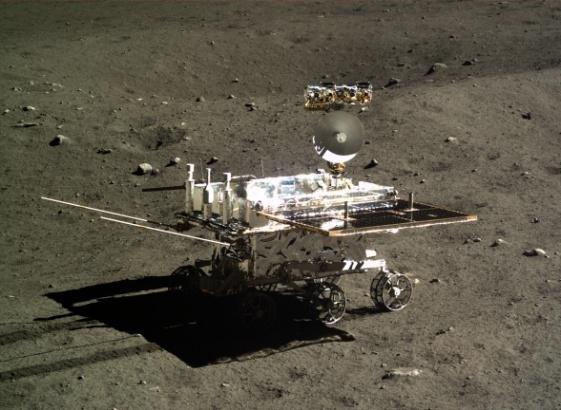
图4 “玉兔”号月球车的悬架结构
3)主动悬架
上述两种悬架均属于被动悬架,而主动悬架依靠驱动装置改变悬架的状态,对悬架形态的恰当控制,能够最大程度的发挥悬架的适应地形能力和辅助越障能力。地面上的越野车,在通过复杂地形时改变质心高度,就是主动悬架的一种应用。
美国是最早开展星球车主动式悬架研究的国家,例如采样返回漫游车SRR(Sample Return Rover)是JPL于1997年开始开发的轻型探测车,如图5所示,其采用四轮摇臂式行走结构,包括一个可变摇臂关节,可以调节侧翼角度,实现下蹲、直立和向左或右倾斜;可以根据地形情况调节车体离地间隙和进行探测车姿态调节。

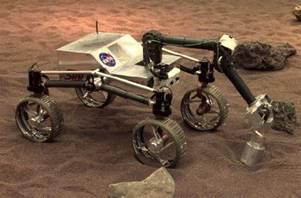
图5 SRR的姿态调节功能
火星是太阳系中与地球最相似的行星,火星探测是近年来国内外深空探测的热点。火星表面地形复杂,既有陡坡、大石块也有松软的沙地。美国火星车在火星表面探索的过程中就曾经遇到难以翻越的沙土质陡坡,也曾经陷入到沙土当中无法移动,因而,如何让火星车适应火星表面复杂的地形成为亟待解决的问题。
火星车以自主行驶为主,容易造成车体被石块“托底”情况,火星表面土壤存在塌陷的可能,存在车轮被陷死的可能。主动悬架能够合理的调整悬架的形态,实现车体高度、角度的变化,抬起某个车轮,避免车体被石块卡住,减少车轮下陷。另外,主动悬架有利于火星车与着陆模块的压紧释放设计,在火星车与着陆模块没分离前,主动悬架处于压缩状态,使火星车车体与车轮均能够与着陆模块保持接触,简化压紧设计;在解锁后,主动悬架伸展,火星车处于“站起”状态,分离简单。
因此,为适应火星复杂地形环境,提高越障能力和脱困能力,同时满足压紧、释放设计需求,火星车悬架采用主动悬架是一种技术发展趋势。
对主动悬架的设计而言,最关键的是主动悬架机构的设计。一般采用两种实现思想。一种思路是在被动悬架机构的基础上进行某种添加或改进,使被动悬架变为主动悬架,也就是被动悬架主动化思想。这一思想的特点是可以充分继承已有的被动悬架构形,设计和实现相对简单,但悬架的重构能力会受到原有构形的影响。另一种思路是采用全新设计的主动机构和作动器,通过机构自身的变形能力,实现整个悬架系统的构形可重构。这一实现思路的特点是机构设计十分复杂,但悬架重构能力好,综合性能好。
目前更多的主动悬架火星车设计实现是基于被动悬架主动化思想而开发,通常又采用以下两种途径:
(1) 主动关节式悬架机构
通过对被动悬架运动机构添加电机和致动器,将某些被动关节转化为主动关节,从而使悬架机构能在运动控制系统的协调下进行重构,实现悬架的变形能力,进而提高对地形的顺应性。
(2) 混合轮腿式悬架机构
在车身或被动悬架的基础上,通过附加主动混合轮腿,实现悬架系统的可重构。这一实现途径赋予了火星车移动系统一定的可重构能力和主动轮步能力,提高了对复杂路面和土壤条件的适应性,但多轮腿的协调运动控制相对复杂。
利用主动悬架移动系统,可以实现三种运动模式:
a.被动悬架运动模式
主动悬架火星车构型采用通用配置参数,并保持主动悬架机构的主动关节锁定,此时的悬架为被动悬架,处于对环境的被动适应状态。当火星车在平坦的硬路面上运动时,适合采用这种模式。
b.主动悬架运动模式
在此模式下,主动悬架机构的主动关节将解除锁定,主动悬架火星车的构型可以根据环境的变化进行主动调节。这种模式适合于不平坦和不规则的路面状况。
c.轮步运动模式
在此模式下,火星车具有轮步运动能力和蠕动运动能力。这种模式适合难于通过的非粘性软土壤和复杂的环境情况。当火星车处于深陷状态而无法脱离时,也可以在这种特殊模式下脱离困境。
总之,具有主动悬架的火星车,可以更好地适应火星复杂的环境,满足任务的需要,具有良好的发展前景。(南山)